在三维动画制作中骨骼的应用是非常复杂的,初期骨骼动画变决定了后期人物动作的流畅性,和还原性。而现实是流畅还原生物学运动原理的骨骼动画并不存在,市场上只能应用昂贵的动作捕捉进行制作,但是一个名为使用基于生物学的执行器和目标优化运动控制器的项目改变了一切,本次来自西安太空动画的小编为你带来关于使用基于生物学的执行器和目标优化运动控制器的全内容介绍。
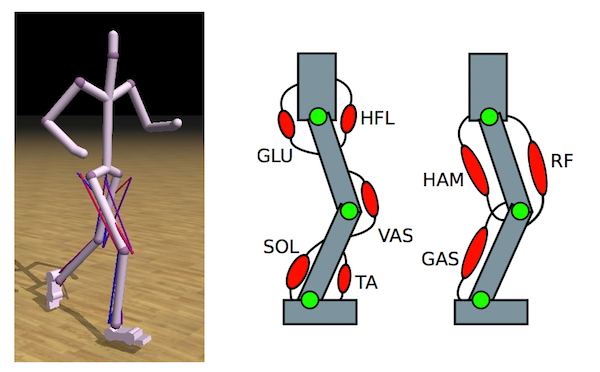
使用基于生物学的执行器和目标优化运动控制器是由Jack M. Wang, Samuel R. Hamner, Scott L. Delp, 和Vladlen Koltun等人共同完成的,他们提出了一种自动合成步行和运行控制器的技术,用于物理模拟的3D人形角色。 矢状髋关节,膝关节和踝关节自由度使用一组八个Hill型肌肉腱模型在每条腿中启动,具有生物学动机控制规律。 这些控制定律的参数由优化程序设定,该程序满足许多运动任务项,代谢能量消耗的生物模型。他们表明,使用基于生物学的致动器和物镜可以显着增加运动控制器产生的步态的真实性,这些运动控制器在不使用运动捕捉数据的情况下运行,并且代谢能量消耗提供了一种简单而统一的工作量测量,可用于 步行和跑步控制优化。
以上就是关于使用基于生物学的执行器和目标优化运动控制器的全面内容介绍了,来自西安太空动画的小编感谢你的观看。